AI算法基础 [7]:MNN中的Strassen实现
前言
主要针对CPU后端,基于
以输入大小:
1 x 8 x 224 x 224(C4 Pack为1 x 2 x 224 x 224 (x 4)),权重大小:16 x 8 x 1 x 1(MNN中将其变换为1 x 4 x 8 (x 4),即对输出通道(卷积核个数)进行C4 Pack), 输出1 x 16 x 224 x 224(C4 Pack为1 x 4 x 224 x 224 (x 4))为例进行辅助说明。没有特殊说明,代码版本均为MNN release_1.2.3版本
适用条件
bool fastWay = common->kernelY() == 1 && common->kernelX() == 1 |
可见只针对kernelX = kernelY = strideX = strideY = 1的卷积操作。
权重重排
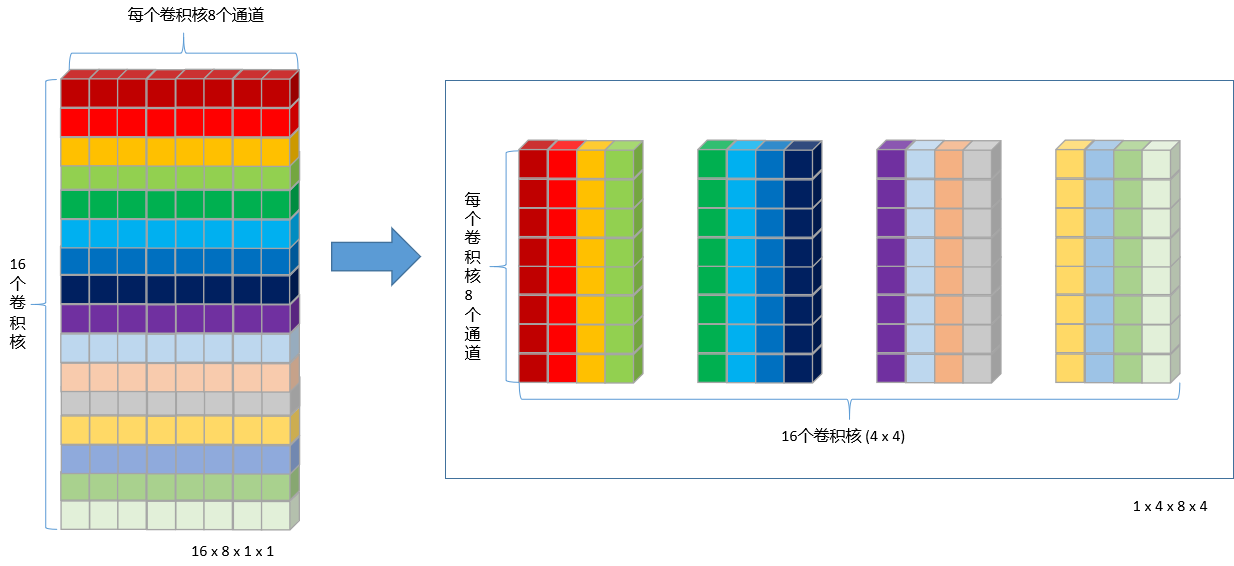
初始权重为NCHW排布:16 x 8 x 1 x1,按NC/4HW4重排后为 1x 4 x 8 (x 4)。即针对卷积核个数进行C4 Pack,示意图如下:
执行代码段如下:
core->MNNPackForMatMul_B(mResource->mWeight->host<float>(), originWeight, outputCount, mSrcCount, true); |
onResize
Strassen的所有步骤实现不在onExecute里,onExecute中只通过mFunctions中的函数指针调用onResize中的实现(将计算步骤拆解成若干个lambda函数,放到mFunctions中)。
MNN多线程加速在这里有不同的选择,当featureMap尺寸很大时,根据featureMap进行划分,每个线程处理一块,否则根据输出通道划分,每个线程处理一个(C4)通道:
if (matrixSizeE > CONVOLUTION_TILED_NUMBER * 8 * numberThread && matrixSizeE > ocC4) { |
暂时按照单线程进行说明。创建StrassenMatMulComputer类对象,通过onEncode接口进入StrassenMatMulComputer实现类:
unit.mStracssenComputor.reset(new StrassenMatrixComputor(backend(), false, maxDepth)); |
注意这里StrassenMatMulComputer类构造函数的第二个参数为false,即mSupportMultiThread=false,表示再往下的操作不会再进行线程划分,因为上面已经做过了。
onEncode会调用_generateMatMul,其中包含Strassen分块的主要实现。
_generateMatMul
Strassen算法本身包含矩阵分块的递归计算,因此_generateMatMul是个递归函数。
那么先看递归的终止条件,即何时结束分块操作,进行普通的卷积运算。终止条件有两个:
-
- 嵌套深度超过设定的最大深度时,或者和矩阵不能再继续分块时:
if (currentDepth >= mMaxDepth || eSub == 0 || hSub == 0 || l % (2 * core->pack) != 0 || l % (2 * lP) || l % (2 * packHUnit) != 0) { |
-
- 读写内存的次数大于普通卷积实现时:
if (saveCost <= 0.0f) { |
递归部分代码的运算顺序和内存buffer使用情况与上一篇介绍的改进版本Strassen算法是一致的,通过将分块操作分解成若干个lambda函数,压入mFunctions向量,在onExecute时执行。
// Strassen Construct |
下面着重看下1 x 1卷积的矩阵乘法和分块逻辑:
普通的1 × 1卷积的矩阵乘法():
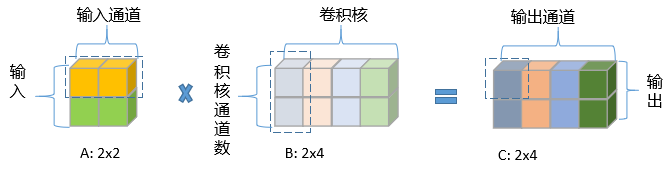
蓝色虚线框代表一次卷积乘加运算
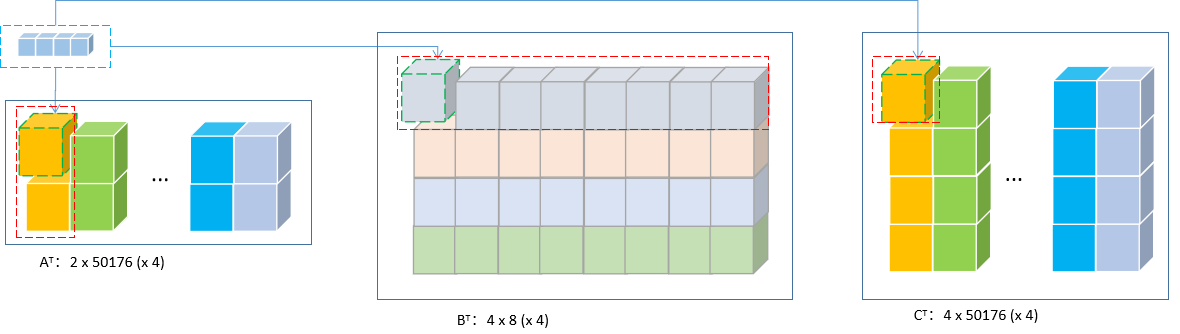
MNNC4 Pack的1 × 1卷积的矩阵乘法:
-
上图中每个方块代表一个
C4 Pack,输入按输入通道pack,卷积核按卷积核个数pack,输出按输出通道pack; -
输入
2 x 224 x 224 (x 4)可以看作普通矩阵乘法中的转置(2 x 50176 (x 4)),卷积核4 x 8 (x4)可以看作普通矩阵乘法中的转置,输出4 x 224 x 224 (x 4)可以看作普通矩阵乘法中的转置(4 x 50176 (x 4))。 -
如果当前矩阵不再进行分块,则一次卷积乘加运算对应为红色虚线框中的元素,直观可以理解为,实际的MNN执行中,会先对矩阵进行重排(
MNNPackC4ForMatMul_A),具体下文再谈。
Strassen矩阵分块:
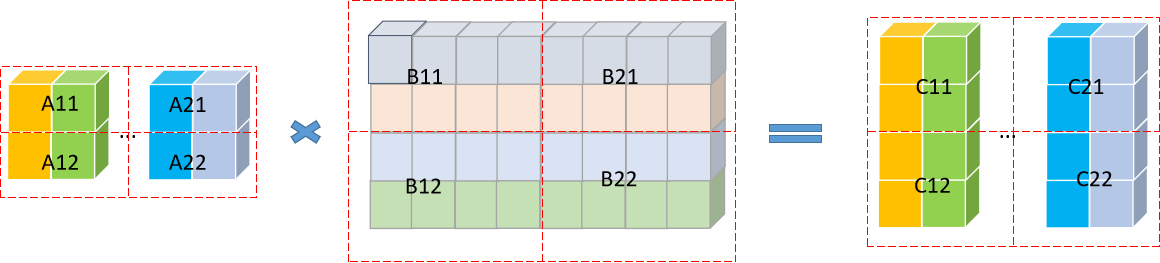
在转置形式下进行分块运算,各子块的矩阵乘法递归调用_generateMatMul直到满足递归终止条件后,切换到普通矩阵乘法。
_generateBasicMatMul
_generateBasicMatMul函数中会调用_generateTrivalMatMul执行普通1 x 1卷积操作,核心代码如下:
mFunctions.emplace_back( |
其中unitNumber为当前线程需要处理多少个unit,假设eP = 24,代表每个unit处理24个C4 Pack,假设numberThread=4,则unitNumber = (224 x 224) / 4 / eP = 522。即一个线程循环中对522个unit进行处理,不能整除的部分单独处理即可。
但是由于之前提到的
mSupportMultiThread=false,numberThread实际上是恒为1。并不会在这一层级进行多线程划分。
对于单个unit的乘加操作,主要在于MNNPackC4ForMatMul_A和MNNPackedMatMul两个函数调用,如果看过这篇文章的话,其实这里跟Winograd的单个tile的乘加操作其实是复用相同的函数。可以跳转去看,这里不再贴上代码。
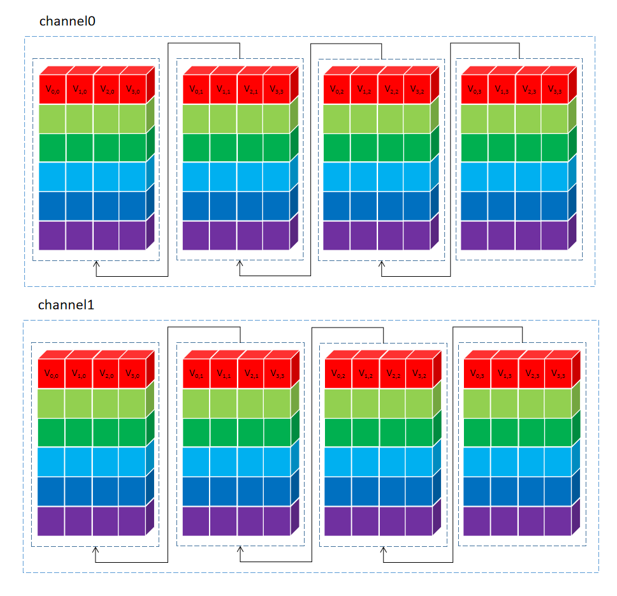
MNNPackC4ForMatMul_A函数重排矩阵
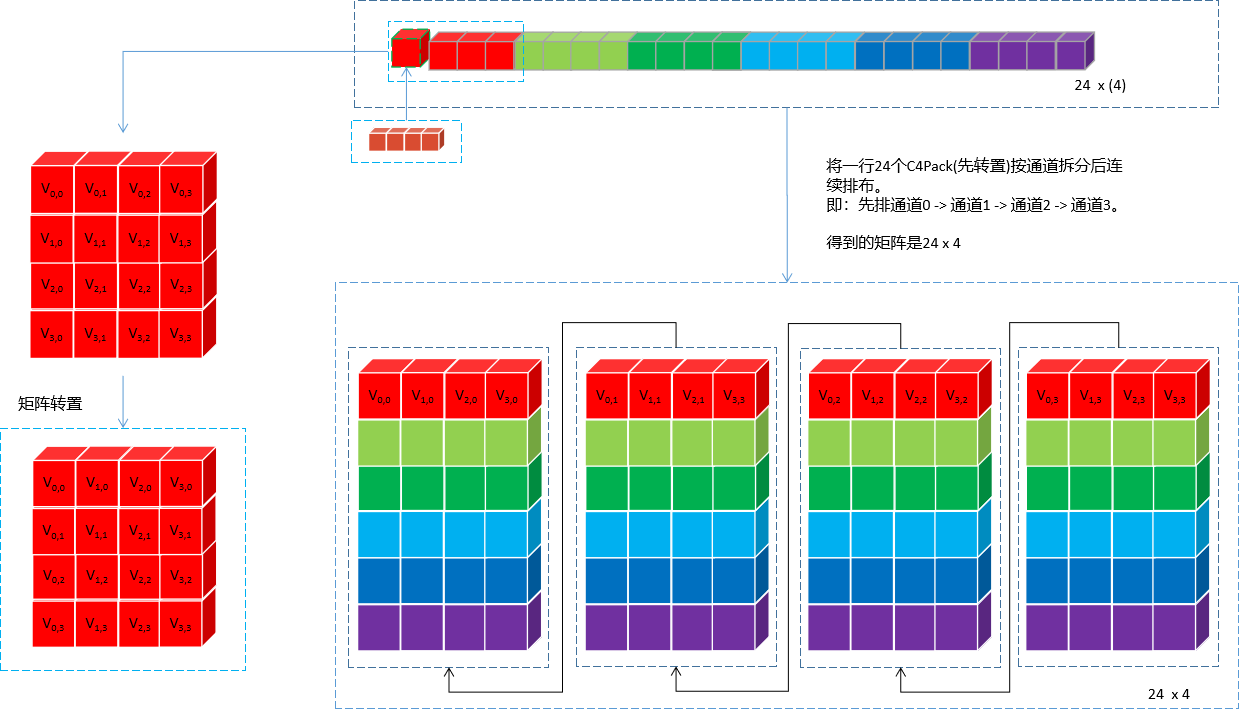
将单个C4通道的24个C4 Pack数据执行通道分离,属于同一个输入通道的24个值排在一起。两个C4通道(8个输入通道)处理完的示意图如下(24 x 8):
MNNPackedMatMul 矩阵乘加
为了解释起来更简单,从上面权重图中拿1个8 x C4 Pack(即:4个卷积核)来,至于所有的4个8 x C4 Pack(即:16个卷积核)卷积核循环4次处理即可。取出来的Mul+Add运算图如下:
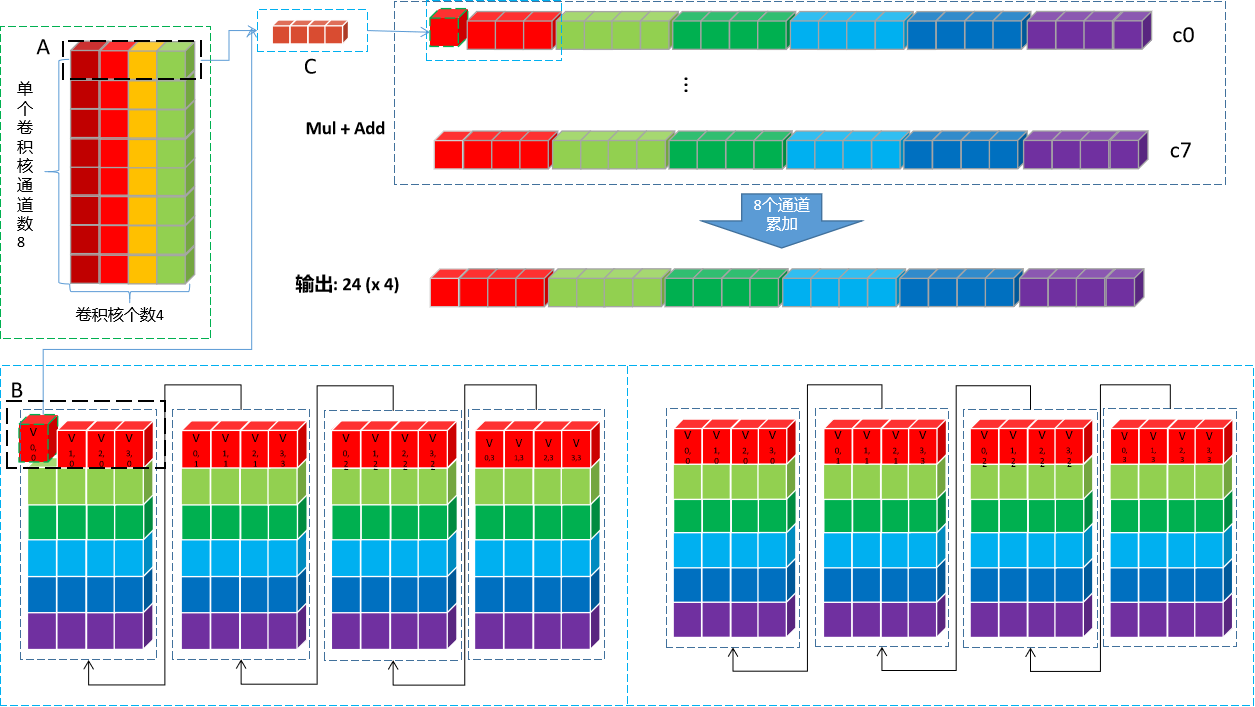
上图中的计算流程归纳一下:
-
MUL操作时,以上图中两个黑色框为计算单元。输入的黑色框中每次取一个值出来,与权重第一行黑色框中4个值依次相乘,并将结果pack到一起,直到24个值全部计算完成,输出一行24 (x 4)。
-
- 输入更新到下一个通道24个值,权重也下移一行,重复8次上述运算。得到
8 x 24 (x 4)。
- 输入更新到下一个通道24个值,权重也下移一行,重复8次上述运算。得到
-
- 将8行数据对应位置累加(即:同一个卷积核的不同通道累加),得到24个点一个
C4 Pack的卷积结果:24 (x 4)。
- 将8行数据对应位置累加(即:同一个卷积核的不同通道累加),得到24个点一个
-
- 卷积核有16个,即:4个
8 x C4 Pack,循环4次,将所有卷积核处理完,得到24个点所有卷积核的卷积结果:24 (x 4)
- 卷积核有16个,即:4个
至此,就完成了一组unit的卷积操作,得到输出4 x 24 (x 4)。处理完所有的unit之后,就完成1 x 1的卷积操作。
post后处理
普通卷积的后处理
void _AVX_MNNPackedMatMulFMA(float* C, const float* A, const float* B, const size_t* parameter, |
在MNNPackedMatMul后,调用GemmPostTreat进行后处理。
递归过程中的后处理
if (!postParameters.empty() && COT.stackIndex >= 0) { |
由于递归过程构建中子矩阵的乘法调用_generateMatMul时传入的COT和postParameters均为空,如下:
auto code = _generateMatMul(eSub, lSub, hSub, X, Y, c21, Empty, currentDepth, {}); |
故实际上,除了递归顶层外,其他递归层次(包括普通卷积层)均不会执行后处理操作。当然,如果普通卷积就是顶层(即没有递归过程),那后处理由普通卷积负责完成。
onExecute
通过mFunctions队列依次执行onResize中构建的Strassen递归操作。
void StrassenMatrixComputor::onExecute(const uint8_t* AT, const uint8_t* BT, const uint8_t* COT, uint8_t* CT) { |
困惑
实际上,在上述尺寸条件下,MNN并不会执行Strassen递归操作,而是直接执行普通卷积。因为Strassen虽然处理的数据规模越大,乘加计算上越有优势,但是在递归过程中访存操作比普通矩阵乘法要多的多,因此为了防止因为访存而引起可能的负优化,MNN每次递归都会对比两者的访存次数,选择访存次数更少的方法计算(即上面的终止条件2)。
MNN源码中cost之差是这样算的:
float AComputeCost = 4 * ((float)eSub * lSub); |
化简一下其实为:
但是不是对于其具体含义还是很困惑,已在github上提了issue,等大佬回复。
按照上述cost计算方法,在固定的情况下,遍历,实测下来会用到Strassen的都是ic和oc大于256的情况。
void TestStrassenCost() { |
致谢
文章主体框架参考自东哥的MNN源码解读的内部分享,加上了自己的一些看法。有幸被看到的话,希望能给点个赞~~
 wechat
wechat alipay
alipay






![现代硬件算法[8.8]: 时空局部性](/images/pd_09.webp)
![现代硬件算法[8.7]: 缓存遗忘算法](/images/pd_08.webp)
![现代硬件算法[8.6]: 淘汰策略](/images/pd_07.webp)
![现代硬件算法[8.5]: 列表排名](/images/pd_06.webp)
![现代硬件算法[8.4]: 外部排序](/images/pd_05.webp)