现代硬件算法[8.4]: 外部排序
外部排序
现在,让我们试着为新的外部存储模型设计一些实际有用的算法。我们在这个部分的目标是慢慢构建更复杂的东西,最终达到外部排序及其有趣的应用。
这个算法将基于标准的归并排序算法,所以我们首先需要推导出它的主要原始形式。
归并
问题:给定两个有序数组(长度为)和(长度为),要生成一个包含两者所有元素的有序数组(长度为)。
用于合并排序数组的标准的双指针技巧如下所示:
void merge(int *a, int *b, int *c, int n, int m) { |
在内存操作方面,我们只需线性地读取和的所有元素并线性地将所有元素写入。由于这些读取和写入操作可以被缓存,所以它需要 $SCAN(N+M) $ 次 I/O 操作来完成。
到目前为止所展示的例子都相对简单,不管是在计算理论还是实际操作上,它们和RAM模型的分析并无太大区别,只是在最后结果中有一步除以块大小的操作。但这个规则在下面这总情况下并不适用:
k路归并:
考虑稍微复杂一些的情况,需要合并的不只是两个数组,而是总大小为N的k个数组 - 同样地,操作过程是查看每个数组的第一个元素(k个值),选择其中的最小值,并将这个最小值写入输出数组c,最后,将指向该最小值的迭代器(即指针或者索引)向前移动一步。
在标准的 RAM 模型中,渐近复杂性会被乘上,因为我们需要执行 次比较来填充每一个元素。但在外部存储器模型中,存储在内存中的操作是“免费”的,不对总体的时间复杂性产生影响。因此,只要我们能够在内存中装下个完整的块,不论我们怎么操作这些数据,总体的时间复杂性都不会受到影响。也就是说,(这里为内存总量,为块大小,这里想表达的是只要不大于 (内存最多容纳块数),那么整体的渐近复杂性就不会发生改变)。
还记得我们在介绍计算模型是提到的的假设吗?如果对于任意 有 ,也就是说如果内存足够大,足以装下一个高于B的任意幂次的块,这当然包括。这种情况被称为高缓存假设,这在许多其他外部存储器算法中也是需要的。
归并排序
标准的归并排序算法的正常复杂度为:在算法的每一层操作中(每次将问题规模缩小一半,所以有层),需要遍历个元素,并在线性时间内将它们合并。
在外部存储模型中,当我们读取一个大小为的块时,我们可以“免费”对其元素进行排序,因为它们已经在内存中。这样我们可以将数组分割为个连续元素的块,并分别对它们进行排序作为基础步骤,然后再合并它们。
这实际上意味着,就I/O操作而言,前层的归并排序是“免费”的,总共有层非零成本层,每层需要做总共 IOPS 来合并。这使得总的I/O复杂度为:
这是相当快的过程。如果我们有1GB的内存和10GB的数据,这基本上意味着我们在排序这些数据时,所需的努力比仅读取数据())要多三点几倍()。然而,有趣的是我们实际上可以做得更好。
k路归并排序
在上面的讨论中,我们了解到在外部存储模型中,我们可以像合并两个数组一样轻松地合并k个数组,代价就是我们必须读取所有这些数组的数据。那么,我们为什么不将这一方法应用到归并排序中呢?
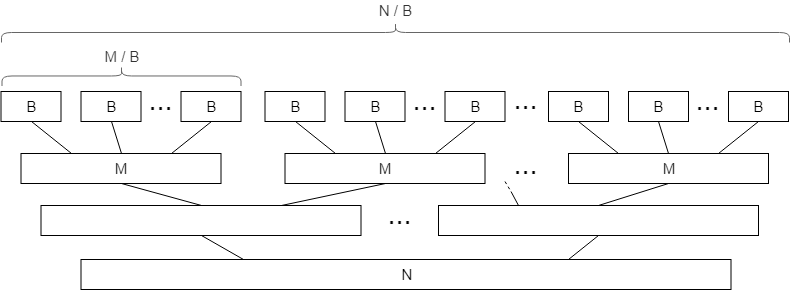
我们将和以前一样对内存中每个大小为的块进行排序,但是在合并阶段,我们不只将两个排序后的块进行合并,而且还会取尽可能多的块,选择适应我们内存大小的k路合并。这样,合并树的高度将大大降低,而每层仍然会在 IOPS内完成。
我们一次可以合并多少个已排序数组?答案是,因为我们需要为每个数组分配一个内存块。由于合并总层数将减少为,因此总的复杂度将减少为:
在我们的例子中,我们有10GB的数据,1GB的内存,硬盘驱动器的块大小大约为1MB。这使得, ,所以对数值小于一(即)。当然,我们对数组进行排序不可能比读取它更快,所以这种分析适用于我们有非常大的数据集,小内存和/或较大的块大小的情况,这在现实中比较少见。
具体实现
在更现实的约束条件下,我们不会选择用层,而是只使用两个步骤来操作数据:第一步在包含M个元素的块中排序数据,第二步是一次性合并所有这些块。从I/O操作的观点来看,这样做我们只需遍历两次数据集。对于1GB的RAM和1MB的块大小,这种方式可以对高达1TB的数组进行排序。
下面是用C++实现的第一步操作。这个程序打开一个大小为若干GB的包含未排序整数的二进制文件,以256MB的块读取它们,将它们在内存中排序,然后将它们写回名为part-000.bin,part-001.bin,part-002.bin等的文件中:
const int B = (1<<20) / 4; // 1 MB blocks of integers |
现在剩下的就是将它们合并在一起。现代硬盘的带宽可能相当高,并且需要合并的部分可能很多,因此,这个阶段的I/O效率并不是我们唯一关心的问题:我们还需要找到一种合并个数组的方法,比通过次比较找到最小值的方法更快。如果我们维护这个元素的一个最小堆,那么对每个元素而言,我们可以在时间内完成这个任务,这与堆排序几乎一样。
下面就是如何实现它。首先,我们需要一个堆(C++中的priority_queue):
struct Pointer { |
然后,我们需要分配并填充buffer:
const int nparts = parts.size(); |
我们现在只需要将堆中的元素取出并放入结果文件中,直到堆为空,并且做到谨慎地批量写入和读取元素:
FILE *output = fopen("output.bin", "w"); |
这个实现方法在性能上并不十分高效,看起来也不够安全(基本上是纯C语言实现),但是是一个帮助我们理解和使用低级内存API的很好教育示例。
连接
排序的主要应用不是单独使用,而是作为其他操作的中间步骤。外部排序的一个重要实际应用就是连接(joining,如SQL中的join),会在数据库和其他数据处理应用中使用。
**问题:**给定两个分别包含元组和元组的列表,输出一个列表使得。
最优解是对两个列表进行排序,然后使用标准的双指针技术来合并它们。在这里,I/O的复杂度与排序相同,如果数组已经排序,那么复杂度为。这就是为什么大多数数据处理应用(数据库,MapReduce系统)都希望保持他们的数据至少是部分有序的。
**其他方法:**注意,这种分析仅适用于外部存储设置——也就是说,如果你没有足够的内存去读取整个数据集,该方法才适用。在现实世界中,可能有更快的备选方法。
其中最简单的可能就是哈希连接(hash join),其大致过程如下:
def join(a, b): |
在外部存储中,使用哈希表来连接两个列表是不可行的,因为即使每个元素都只存在于其中一个列表中,也会涉及到次块读取。
另一种方法是使用其他排序算法,如基数排序(radix sort)。特别是,如果有足够的内存来维护所有可能的键值的缓冲区,基数排序将需要次块读取(其中 是键值的位数),这在处理小键值和大数据范围时,可能会更快。
 wechat
wechat alipay
alipay






![现代硬件算法[8.4]: 外部排序](/images/pd_05.webp)